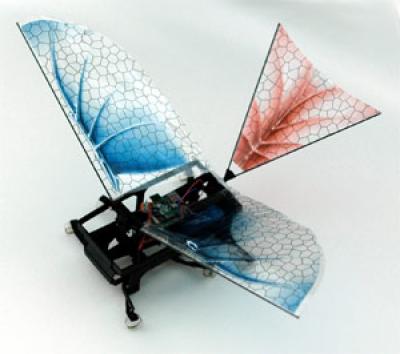
Rencontre entre le monde biologique et l’univers des ingénieurs, le biomimétisme s’inspire des formes vivantes autour de nous pour résoudre des impasses technologiques. Ainsi, la robotique étudie la façon dont les animaux se déplacent pour développer de nouvelles machines : Big Dog, le robot quadrupède, une chenille qui fait la roue, des insectes-cyborg téléguidés… Le laboratoire de millisystèmes biomimétiques à l’université de Californie de Berkeley (États-Unis) a conçu en 2009 un petit robot à six pattes baptisé DASH (pour Dynamic Autonomous Sprawled Hexapod) inspiré… du cafard – vous pouvez admirer ses prouesses en vidéo. Aujourd’hui doté d’ailes, ce robot trace un lien avec l’apparition des premiers oiseaux il y a 150 millions d’années.
Comment l’adjonction des ailes influe la locomotion du cafard mécanique ? Alors qu’il se déplace habituellement à une vitesse de 0,7 m/s, le robot avance plus vite lorsque ses ailes battent, doublant presque sa vitesse à 1,3 m/s ! Pour en savoir plus, les chercheurs ont équipé le robot d’un “sac à dos” chargé d’appareils électroniques, dont un accéléromètre qui mesure les forces qui s’exercent sur le robot pendant son déplacement. À partir de ces informations, ils déterminent que le centre de gravité du cafard oscille de haut en bas durant sa marche (comme chez l’homme). Lorsque les ailes battent, l’amplitude de ces oscillations diminue : moins d’énergie est consommée dans ce mouvement “inutile”, permettant de la concentrer sur le mouvement vers l’avant, le seul pertinent pour la marche. En stabilisant le centre de gravité du robot, le battement des ailes lui permet d’avancer plus vite tout en consommant globalement autant d’énergie. Pour les mêmes raisons, le robot ailé parvient à grimper des pentes plus marquées en battant de ses propres ailes (17°, contre 6° sans ailes).
Équipée de ses deux ailes, le robot est également plus stable dans le cas où ses pattes sont mal réglées en longueur. Lorsqu’il ne peut compter que sur ses six pattes bancales, le robot est en effet très instable, et peut facilement se retourner, finissant sur le dos. La présence des ailes assure une plus grande stabilité aérodynamique de l’ensemble, le rendant moins sensible aux perturbations liées aux pattes défectueuses. Enfin, lâché en chute libre, le robot ailé peut retomber sur ses pattes, et continuer à avancer une fois revenu sur la terre ferme.
Le robot-cafard, cousin de l’Archaeopteryx ?
Que nous apprend ce petit robot sur l’évolution des premières espèces ailées ? Dans une étude publiée en 1999, deux paléontologues américains se sont penchés sur l’Archaeopteryx, le plus ancien fossile ailé connu. Si pour certains, les premiers animaux volants se sont élancés du haut des arbres, d’autres paléontologues soutiennent l’hypothèse d’un envol d’animaux sprinteurs. Partisans de cette dernière théorie, les chercheurs américains ont évalué la force supplémentaire que l’oiseau aurait fallu fournir pour s’envoler en bout de course. Pour ce faire, l’Archaeopteryx se serait appuyé, comme le robot-cafard, sur le turbo produit par le battement des ailes, cette accélération lui faisant atteindre la vitesse suffisante. Cependant, d’après leurs calculs, il faudrait que le battement des ailes aboutisse à une vitesse quatre fois supérieure à la simple course pour soulever l’oiseau. Une accélération plus importante que celle mesurée pour le robot-cafard, limitée à 1,88.
D’un point de vue évolutif, le battement des ailes a-t-il suffi à l’apparition du vol ? L’écart entre l’accélération du robot et les estimations faites sur l’Archaeopteryx est peut-être lié aux différences morphologiques entre le fossile et son alter-ego moderne et mécanique. Des études sont en cours sur un robot ailé bipède, BOLT (BipedalOrnithopter for Locomotion Transitioning), mis au point par la même équipe de roboticiens, afin de retracer le chemin de l’évolution en sens inverse et poursuivre cette quête qui, de l’Archaeopteryx en passant par Icare et la mission Appolo, nous a fait quitter le sol pour la douceur des airs.
Source : K. Peterson et al., A wing-assisted running robot and implications for avian flight evolution, Bioinspiration & Biomimetics, 17 octobre 2011 ; P. Burgers et L. Chiappe, The wing of Archaeopteryx as a primary thrust generator, Nature, 6 mai 1999.
Crédits photo : Kevin Peterson, UC Berkeley Biomimetic Millisystems Lab.