Comment mettre en branle un objet inerte et recréer ainsi cette faculté naturelle des êtres vivants à se mouvoir ? Cette interrogation a mobilisé de nombreuses générations de chercheurs et d’ingénieurs, de Héron d’Alexandrie et son éolipyle au Ier siècle jusqu’au Belge Étienne Lenoir, père du moteur à explosion en 1860 en passant par Denis Papin, qui a inventé la machine à vapeur à la fin du XVIIIe. Aujourd’hui, l’équipe de “bio-ingénieurs” de Rashid Bashir, à l’université de l’Illinois à Champaign-Urbana (États-Unis), poursuit cette tradition, mais cette fois-ci sans essence ni vapeur. Ils ont donné naissance à une “machine biologique”, baptisée “robiot” : ce marcheur, long de quelques millimètres, est propulsé par des cellules cardiaques vivantes et remuantes.
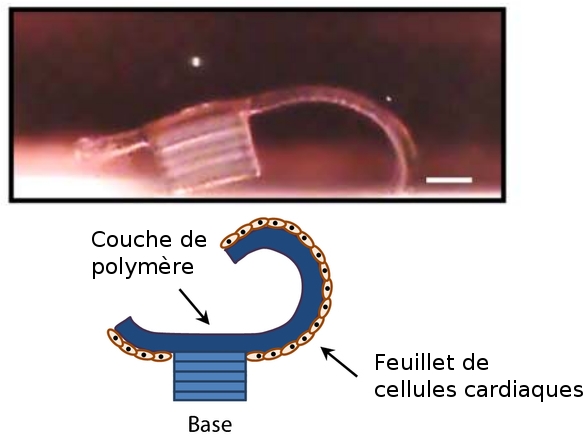
Ce “robiot” tire son énergie d’un feuillet de cellules musculaires cardiaques, les cardiomyocytes, capables de se contracter spontanément (observez l’étonnant mouvement de ces cellules dans une boîte de Petri ici). Comment mobiliser cette source d’énergie autonome, qui engendre un mouvement contractile, pour déplacer une machine ? Les chercheurs américains ont placé les cellules musculaires cardiaques sur une couche de polymère flexible, posée sur une base plus rigide. En faisant varier l’épaisseur de la couche de polymère, il est possible de modifier sa courbure pour que l’un des côtés (sa “jambe”) s’approche de la surface sur laquelle le robiot est posé.
Tout est une histoire de frottements
Les cellules cardiaques battent à une fréquence régulière, ici 1,5 Hz (soit 90 fois par minute). À chaque contraction, elles déforment l’ensemble de la “machine” ; pour que celle-ci se déplace, il faut que la force qu’elle engendre dépasse toutes celles qu’elle subit, y compris les forces de frottement avec le liquide dans lequel elle évolue et avec la surface sur laquelle elle est posée.
Décomposons le mouvement du “robiot”. Initialement en l’air, la jambe “actionneuse” se plie et entre en contact avec la surface, induisant une force de frottement dirigée vers l’avant, mais contrariée par la base immobile. Alors que la machine continue à se courber, la seconde jambe, la base rigide, décolle de la surface : les frottements deviennent alors plus importants à l’arrière et entraînent la machine vers l’avant. Les cellules se relâchent enfin : la base revient se poser sur la surface, environ 340 micromètres plus loin. Le robiot se déplace ainsi à une vitesse moyenne de 236 µm/s, soit tout de même 85 centimètres en une heure.
Les chercheurs pensent déjà à de nombreuses améliorations à apporter à leur “machine biologique”. Certaines molécules ayant la capacité de moduler la fréquence de contraction des cellules cardiaques, ils imaginent déjà des pédales d’accélération et de frein “chimiques”. L’optogénétique, qui permet de contrôler l’expression de certains gènes par la lumière, peut ainsi “éteindre” les battements des cellules : la clé de contact du robiot serait alors un rayon laser. Les auteurs envisagent enfin d’intégrer “des réseaux neuronaux pour réguler la contraction musculaire via des jonctions neuromusculaires“. Le robiot pourrait alors détecter la présence d’une toxine, se déplacer jusqu’à elle et relarguer un produit pour la neutraliser. Nous avons besoin urgemment d’un nouvel Asimov pour rédiger les Trois Lois de la Robiotique !
Source : V. Chan et al., Development of Miniaturized Walking Biological Machines, Scientific Reports, 15 novembre 2012.